
Communication between Autonomous Mobile Robots (AMRs) and lifts is vital for optimizing factory operations. SK Robotics’ AMRs adapt to various lift types and operational requirements, navigating tiered factory floors to ensure timely delivery of goods, boost productivity, and minimize downtime and errors.
By analyzing floor traffic, obstacles, and machinery proximity, the AMRs optimize routes for efficiency and safety, enabling proactive risk management. Integrating AMRs with automated lift operations further streamlines material handling, reduces manual intervention, enhances workflow, and lowers operational costs by optimizing resource use and minimizing time.
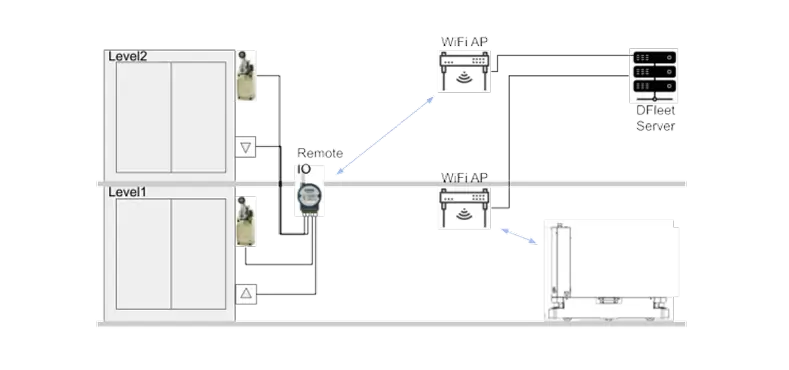
L300 AMR offers a flexible interface to integrate with various lift systems, further enhancing its adaptability within factory environments. One significant method involves employing an external I/O interface, which enables the AMR to interact with lift controls effectively. The AMR communicates with the DFleet server, which sets up the interaction with the lift system through a strong WiFi connection.
A scenario of external I/O interface during an operation where the AMR needs to move from Level 1 to Level 2:
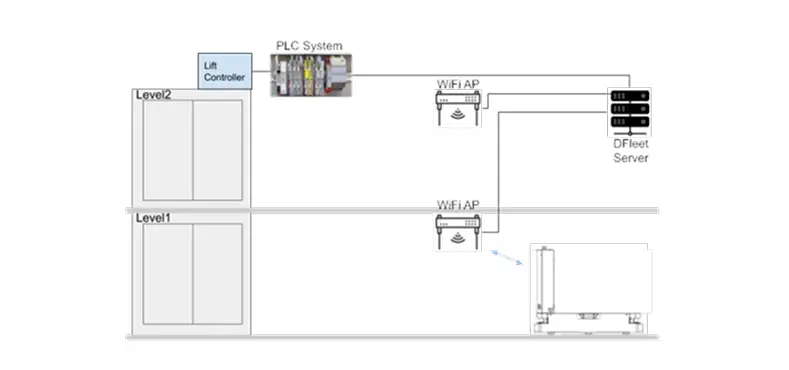
This method, a Programmable Logic Controller (PLC) or equivalent system is added depending on the Lift Controller interface type to facilitate communication between the AMR and the lift system. The internal I/O interface system serves to translate triggering signals from the DFleet server into commands compatible with the specific protocol of the lift controller. This interface system normally requires customization as the Lift Controller might require different interface protocol for the controls.
A scenario of internal I/O interface during an operation where the AMR needs to move from Level 1 to Level 2:
NavWiz supports multiple active maps, allowing separate setup and configuration for each floor. SK’s Teleport feature enables AMRs to “jump” between levels by switching maps. During path planning, the system automatically detects level changes, triggering the Teleport Task Template to handle all lift interfaces. This simplifies configuration and allows reuse across floors.
SK’s AMRs, with advanced communication and navigation, streamline material handling and enhance operational efficiency, demonstrating the impact of automation in modern factories.
If you want to see the L300-e2 AMR in action Click here!
OUR EXPERT TEAMS WILL REACH
OUT TO YOU IN NO TIME